
Для более точного позиционирования в WLMill была добавлена поддержка энкодерных линеек с организацией обратной связи ещё этой весной. Однако динамическое позиционирование было не столько хорошим как хотелось. И чтобы его улудшить были добавлены 2 коэффициента (FFP\FFD) прямой регулировки (без учёта линейки). В результате чего динамическая точность существенно повысилась.
Общий принцип сейчас такой:
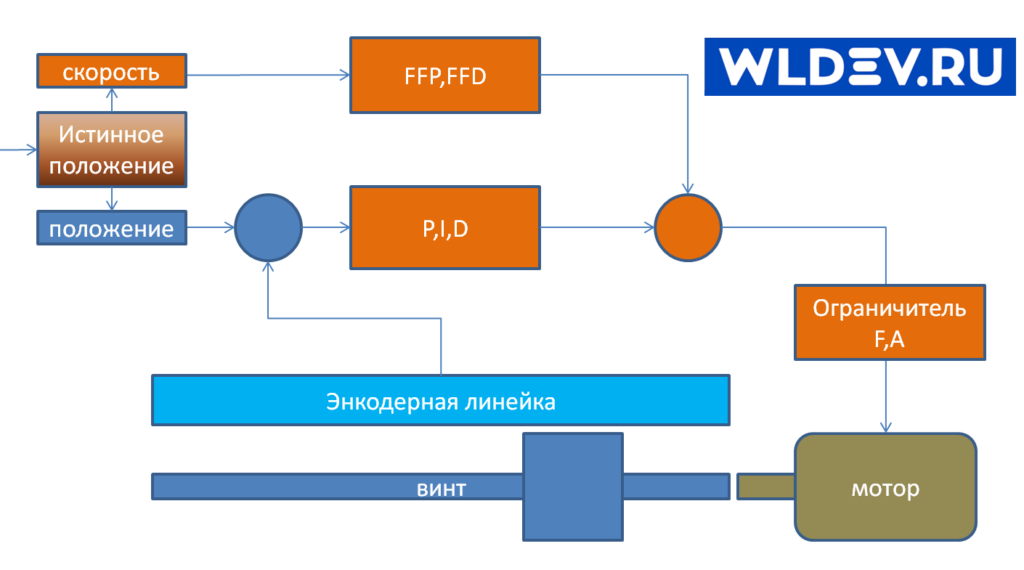
Общий алгоритм такой.
- Устанавливаем все коэффициенты в ноль.
- Расcчитываем и устанавливаем FFP для шагового двигателя. FFP = (шаг линейки)/(один шаг двигателя)
- Устанавливаем режим для ШД все 0. (нет ограничений)
- Устанавливаем заведомо большую ошибку позиционирования. Например 10мм
- Включаем WLMill и пробуем подвигать ось в ручном режиме. При этом нужно проверить совпадает ли направление энкодерного входа(по закладке где входы/выходы ). В случае необходимости инвертируем энкодер ПКМ на энкодер в настройке оси.
- Если мы правильно задали FFP, то наша ось должна двигаться практически по всему диапазону перемещения без ошибок.
- Настраиваем FFD,P,I,D. И Уменьшаем ошибку.
необходимо обновить WLMill + прошивка beta





