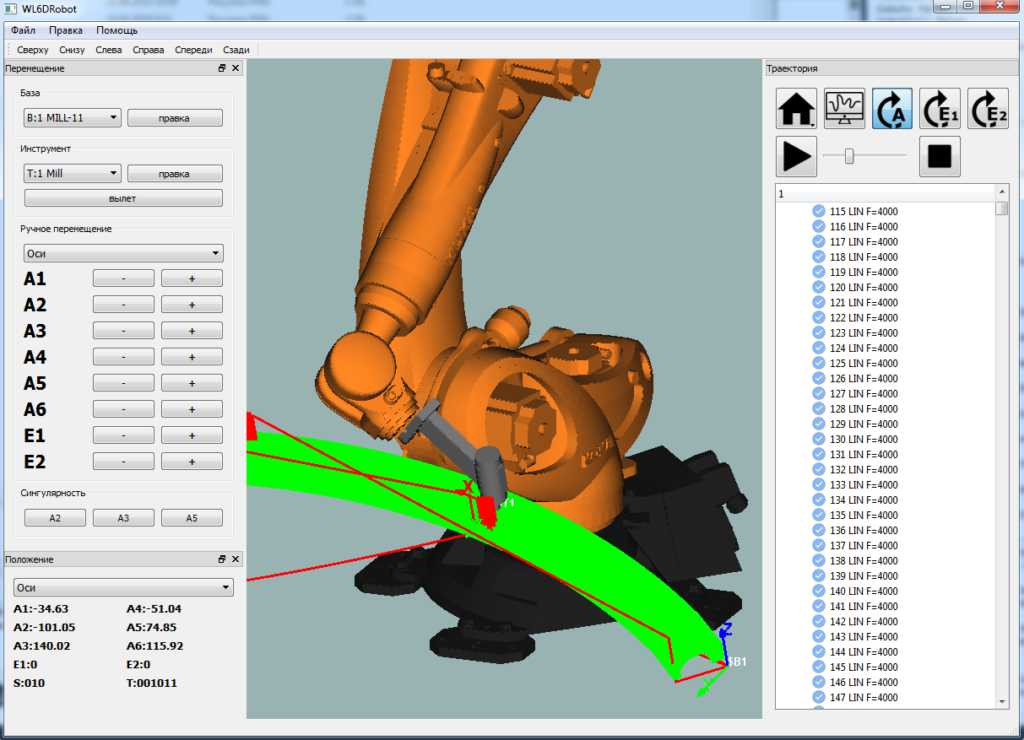
WL6DRobot – программа предназначена для создания, редактирования и конвертации из Gкода траекторий для робота. С последующим моделированием.
В результате её работы получается траектория для робота которую можно либо сохранить в файл KRL (KUKA) либо передавать её напрямую в робот (KRC4).
Доступна бесплатная (demo )версия которая может генерировать до 300 строк.