
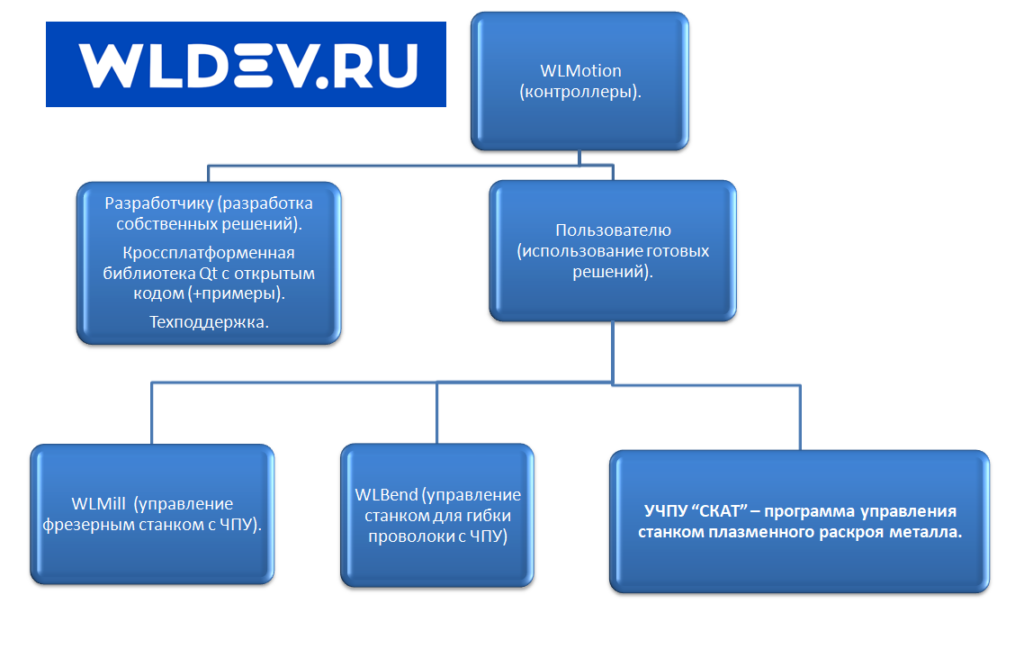
Наши ЧПУ контроллеры перемещения WLMotion (White Line Motion, ВиЭлМоушн) могут использоваться для решения различных задач где необходимо задавать движение шаговым двигателям и/или серводвигателям. Управлять внешней автоматикой, обрабатывать сигналы и прочее.
Контроллеры WLMotion являются законченным продуктом и могут быть использованы разработчиками систем позиционирования и/или автоматизации чего либо. То есть разработчику необходимо всего лишь сообщить контроллеру куда и как ему нужно переместить привод.
Каждый контроллер состоит из нескольких программных модулей (см.ниже). С которыми может работать разработчик или какое либо устройство….
Контроллеры WLMotion:
- Возможность использования S кривых разгона оси.
- Автономный контроль движения оси.
- Автономный планировщик траектории.
- Работа с подчиненными осями.
- Установка разных режимов движения для каждой оси.
- Установка различных режимов движения для одной оси в положительном и отрицательном направлении.(например, чтобы ось Z перемещалась вниз быстрее).
Контроллеры:
| Контроллер | Количество осей | Входы (диск.) | Выходы (диск.) | Энкодерные входы | Входы (0-5В) | Выходы (0-10В) | PWM выходы | Преобразователь ШИМ напряжение | USB | Ethernet | CAN | RS485 |
| WLM35A | 4 | 5 | 12 | – | – | – | 2 | 1 | 1 | – | – | – |
| WLM35J | 4 | 15 | 13 | 1 | – | – | 1 | 1 | 1 | – | – | – |
| WLM55J | 4 | 15 | 13 | 4 | – | – | 2 | 1 | 1 | – | – | – |
| WLM55E | 4 | 14 | 12 | 4 | – | – | 2 | 2 | 1 | 1 | – | – |
| WLM155S | 6 | 19 | 20 | 4 | 4 | 2 | 4 | – | 1 | 1 | 1 | 1 |
| WLM155S (v 9) | 6 | 20 | 22 | 4 | 4 | 4 | 5 | 2 | 1 | 1 | 1 | 1 |
| WLM155H | 6 | 18 | 33 | – | – | – | – | 1 | – | 1 | – | 1 |
Обновления
2.3.9; 25/01/24; Исправлена ошибка в планировщике. При мелких участках могли происходить остановки в движении.
2.3.8; Исправлена ошибка в планировщике которая могла приводить к неоправданному замедлению. Для контроллеров 155 устранен недочёт при котором не устанавливалось соединение если перед загрузкой кабель Ethernet не был вставлен в контроллер. WLM155S исправлен баг при котором сбрасывалась инверсия выходов 2,3.
2.2.22; Исправлена ошибка при передаче данных из контроллера. Исправлен алгоритм трекинга скорости оси.
2.2.21; Исправлена установка флага быстрого изменения выхода управления шпинделя.
2.2.20; Исправлена проверка дуг. Изменен порядок отправки данных при остановке планировщика.
2.2.18; Исправлено. Не ждал раскрутки шпинделя если на паузе он был остановлен и не было движений на паузе




