Обновление в основном коснулись отладки поиска по датчику inORG как проходному. Чтобы использовать такой тип поиска нужно: Если у вас ось с пределами (софт лимиты). То перед началом поиска метка должна быть на датчике, а …
Доработана документация для контроллеров WLMotion. А именно добавлен раздел “Подключение частотного преобразователя”. Подключить шпиндель к контроллеру можно по разному: Желательно подключить выход частотного преобразователя к контроллеру, с помощью которого можно узнать об остановке шпинделя (ошибке …
Очередное обновление. Добавлена поддержка G16/G15 (включение/выключение временной полярной СК в плоскости XY). Полярные СК удобны при работе с элементами расположенными по кругу. Например отверстия для двигателя. Задание центра поляной СК: После того как мы включили …
Некоторые контроллеры которые имеют модуль MSociloscope(осциллограф) . С помощью которого можно получать данные из контроллера и выводить их в виде графиков (осциллограммы). Это нужно для динамического анализа и понимания процессов. Для работы с осциллографом есть …
Изменения: Выбрать данный режим можно нажав и удерживая кнопку типа ручных перемещений. Для данной версии нужна прошивка контроллера 2.3.11+ . Кстати! Для каждой оси можно настроить режим для ручных перемещений (ограничить скорость например). Для этого …
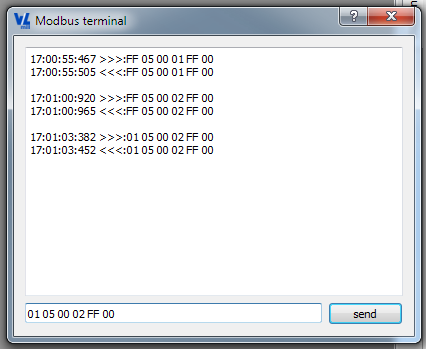
Иногда требуется вручную установить какие либо параметры устройства через Modbus. Или протестировать его работу через запросы. Для этого подойдёт простой терминал, через который можно легко отправлять и получать данные. Расчёт CRC сумм происходит автоматически.
Добавлены кнопки buttonUserFunc6 (7,8,9,10) – изначально они невидимы Добавлены функции по кнопкам userFunc6 (7,8,9,10) – вызываются при нажатии на кнопки Добавлены кнопки buttonM3 (4,5,7,8,9)
действие с кнопками bool isVisible() //возвращает 1 если кнопка видна bool isEnabled() //возвращает 1 если кнопка активна bool isChecked() //возвращает 1 если кнопка нажата (см setChekable)
setChekable(bool) //установка режима работы кнопки с фиксацией setChecked(bool) // установка кнопки в положение нажато (см setChekable)
setIcon(file) //установка иконки кнопки. вводится имя файла либо каталог относительно файла программы. Для разделения каталогов используется такой слеш – /
setToolTip(txt) //установка всплывающей подсказки setText(txt) //установка текста на кнопку
setShortcut(txt) //установка клавиш быстрого вызова. Например “Ctrl+1” setVisible(bool) //установка видимости (отображения кнопки) setEnabled(bool) //установка активности кнопки
+ Добавился значок приложения в Windows, спасибо пользователю rstm!!!
+
Добавлена очередь при выполнении скриптов. Раньше возникала оибка если вызывался скрипт когда другой ещё не закончен.
– найдена проблема с залипанием ручных перемещений – скорости стали задаваться в мм/мин (настройки оси) – при малых перемещениях мыши не вращался вид траектории – исправлено + добавлен вход inPause при смене уровня происходит реакция как на нажатия кнопки пауза на экране. + если во время паузы был выключен шпиндель то при продолжении обработки он будет запущен снова
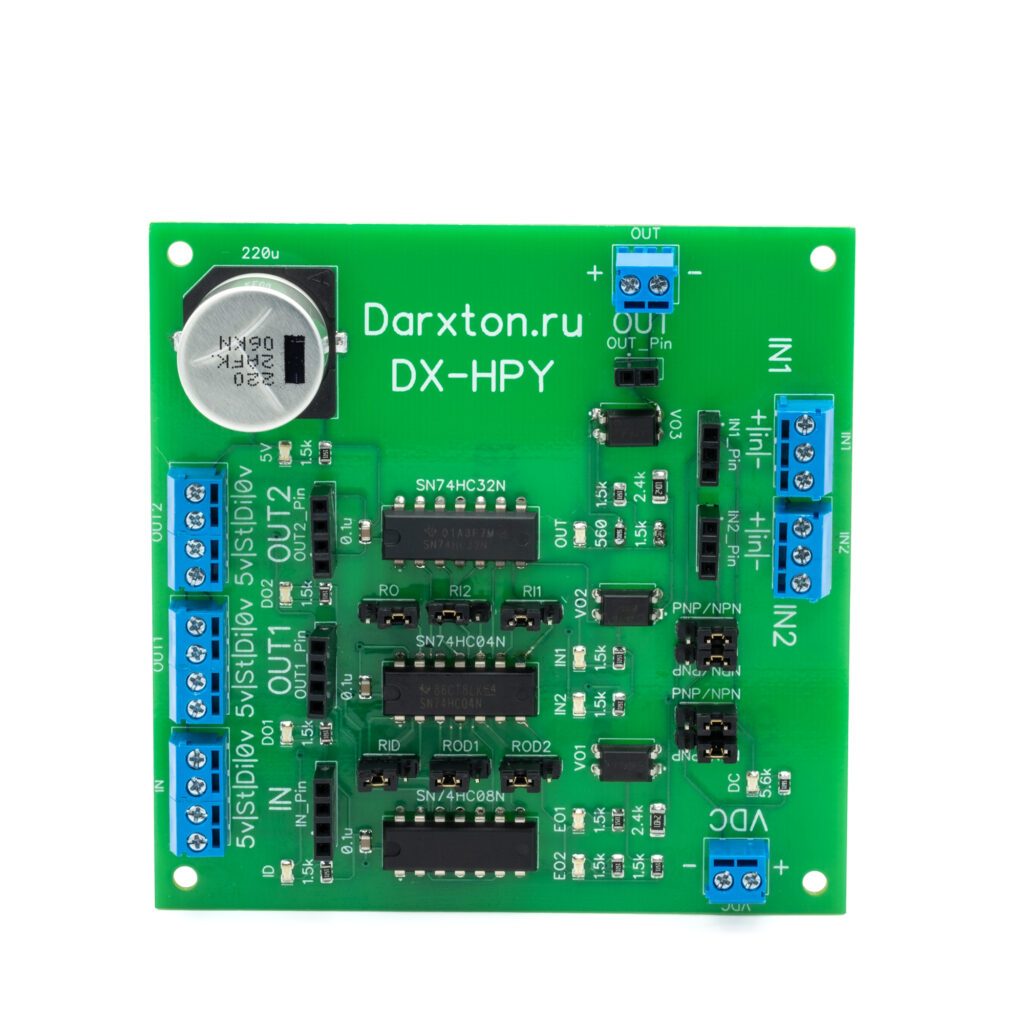
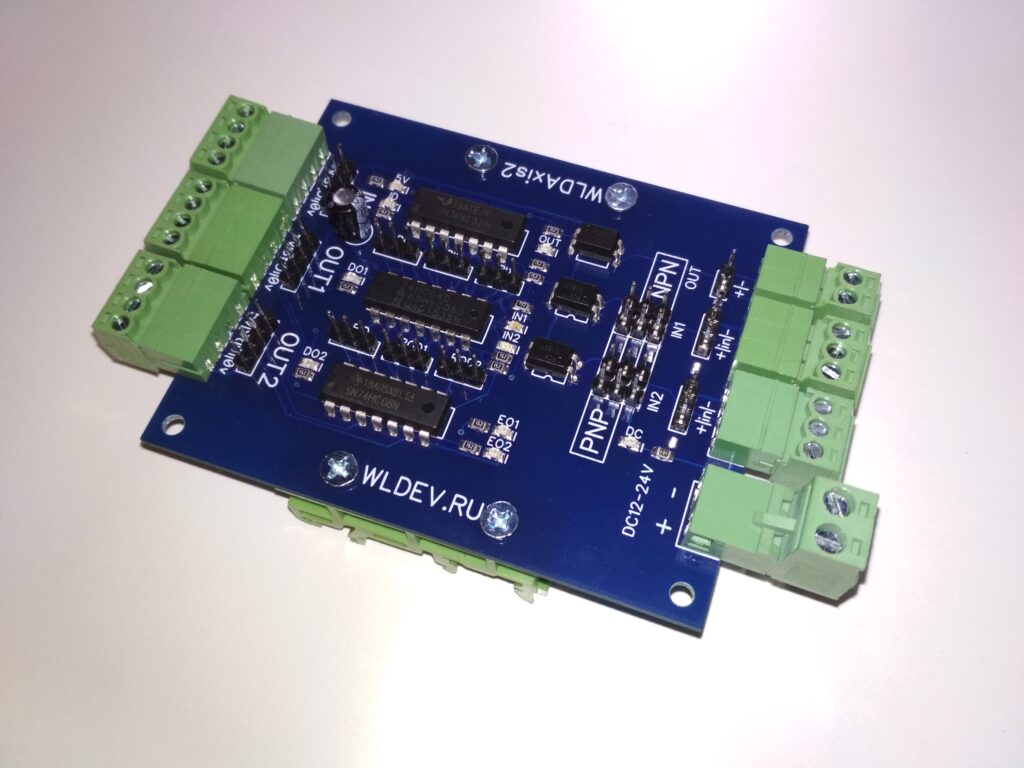
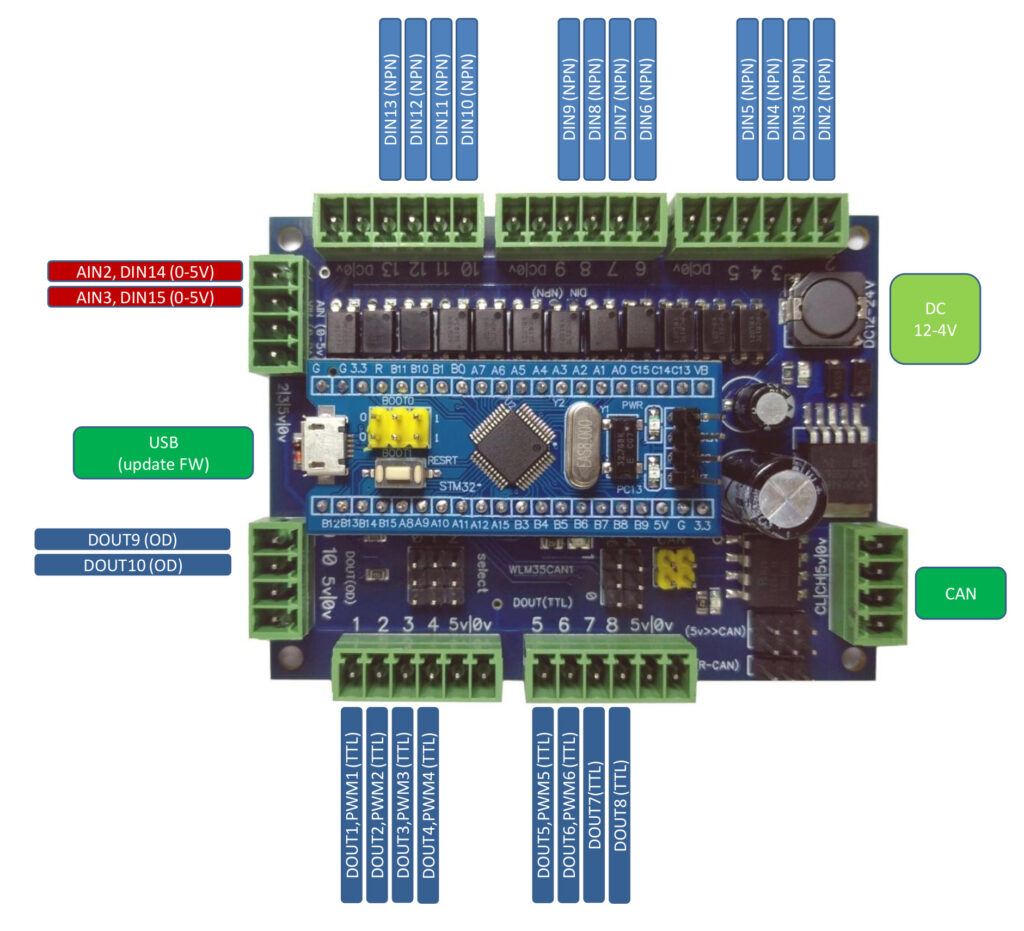
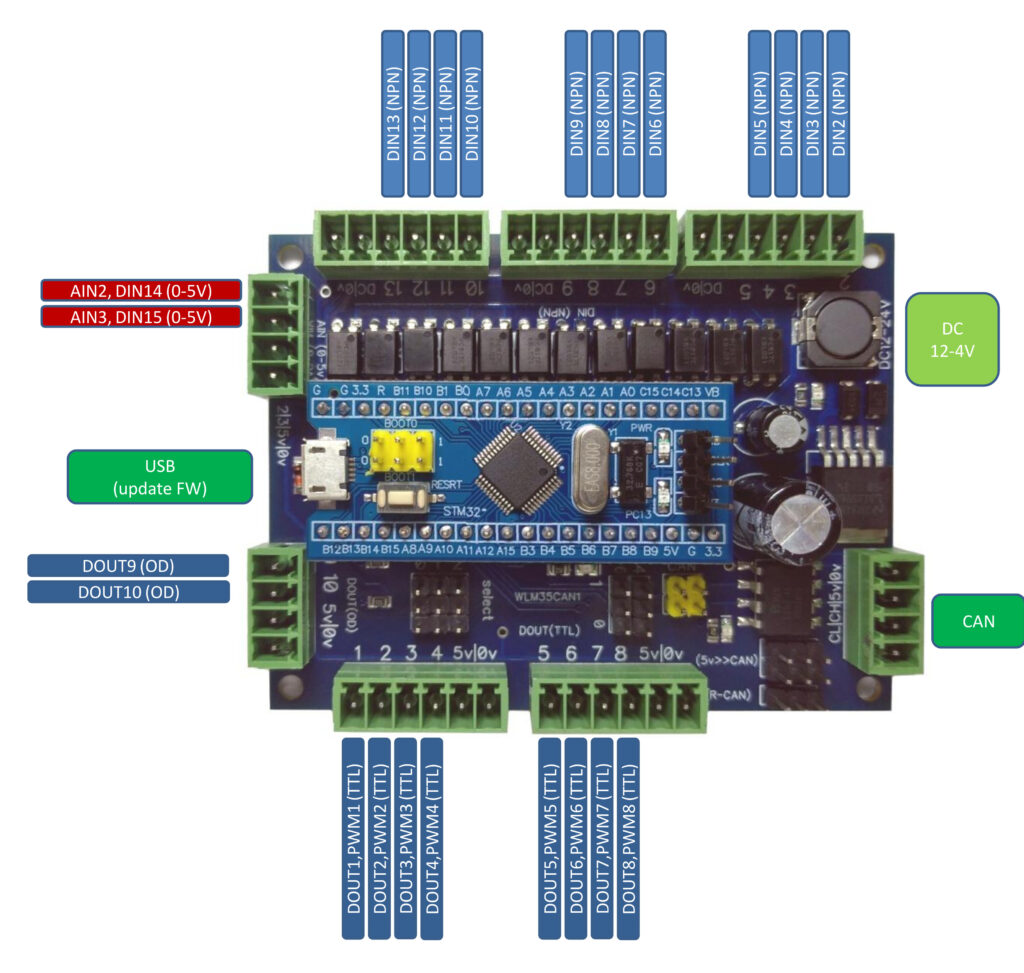
Проходят тесты работы платы расширения WLM35CAN1 для контроллера WLM155S. Она используется для увеличения количества физических входов/выходов в вашей системе ЧПУ. Основные особенности:
1. Оптоизолированный CAN интерфейс .
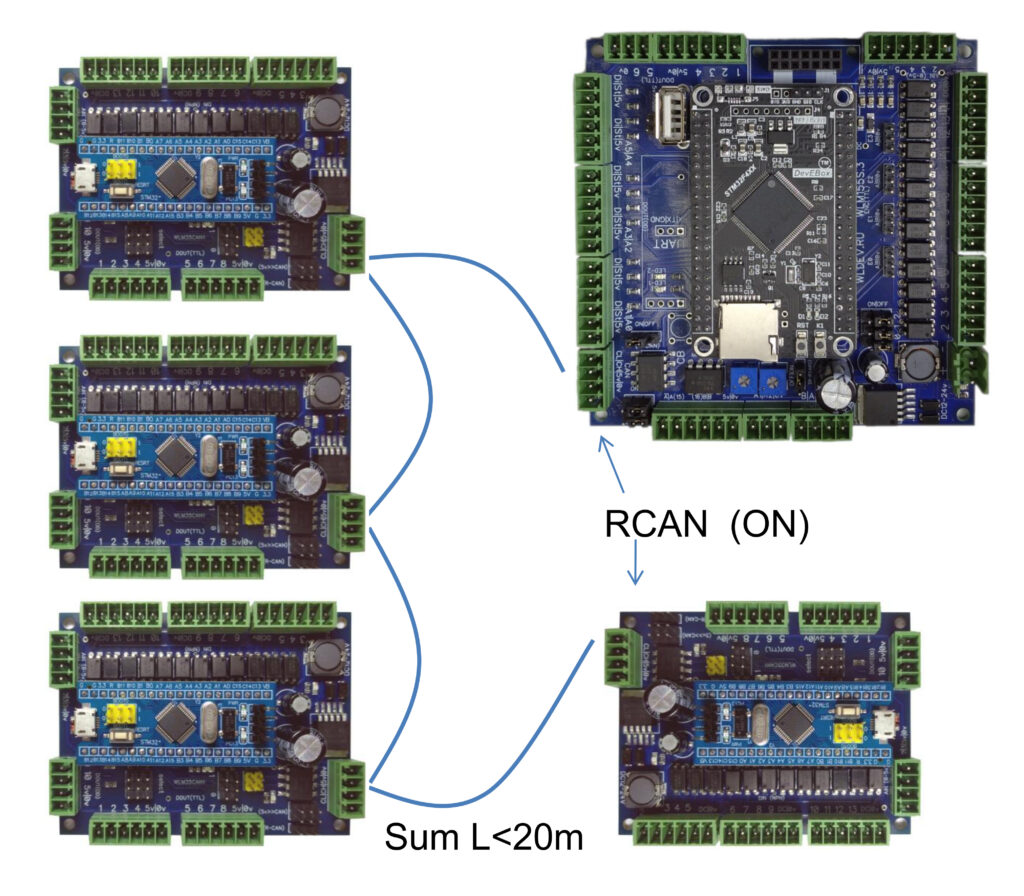
2. Возможность подключения нескольких плат расширения к одному контроллеру.
3. 14 – дискретных входов. 2 – аналоговых входа (совмещены с дискретными). 10 – дискретных выходов (8 ТТL, 2 OD). 4 – ШИМ выхода (совмещены с дискретными выходами).
WLFW: Теперь можно загружать либо текущую прошивку, либо beta(тестовая,пробная).
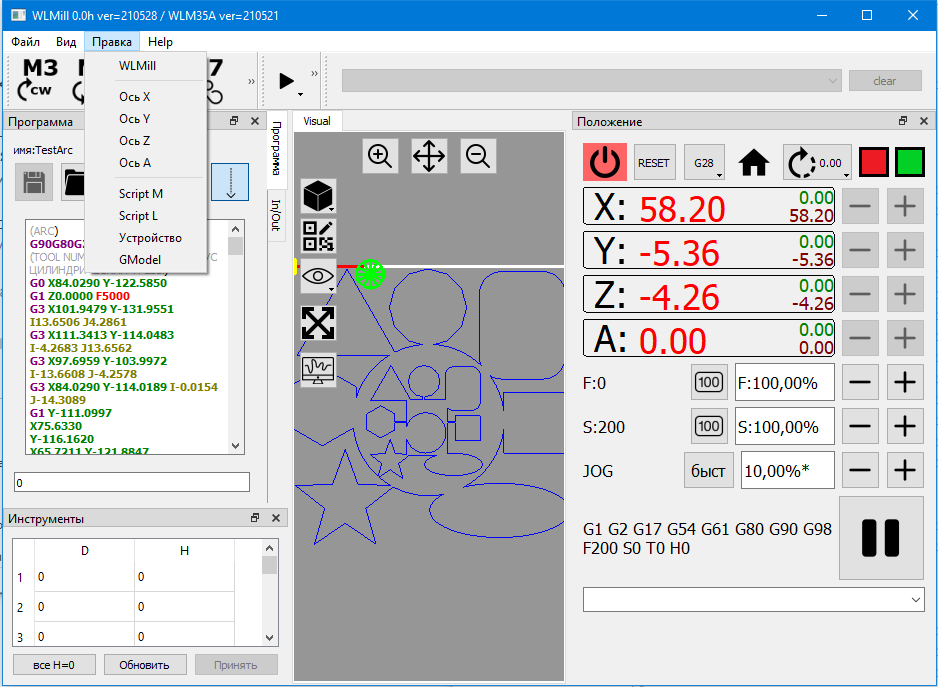
WLMill beta: Добавился новый вход inPause. При смене его состояния происходит реакция как и на кнопку “паузы” в WLMill. Важно!!! – нужно заново определить вход inProbe (если он не переопределён, то появится ошибка).